En la programación textual, las acciones que ha de realizar el brazo se especifican mediante las instrucciones de un lenguaje. En esta labor no participa la máquina (off-line). Las trayectorias del manipulador se calculan matemáticamente con gran precisión y se evita el posicionamiento a ojo, muy corriente en la programación gestual.
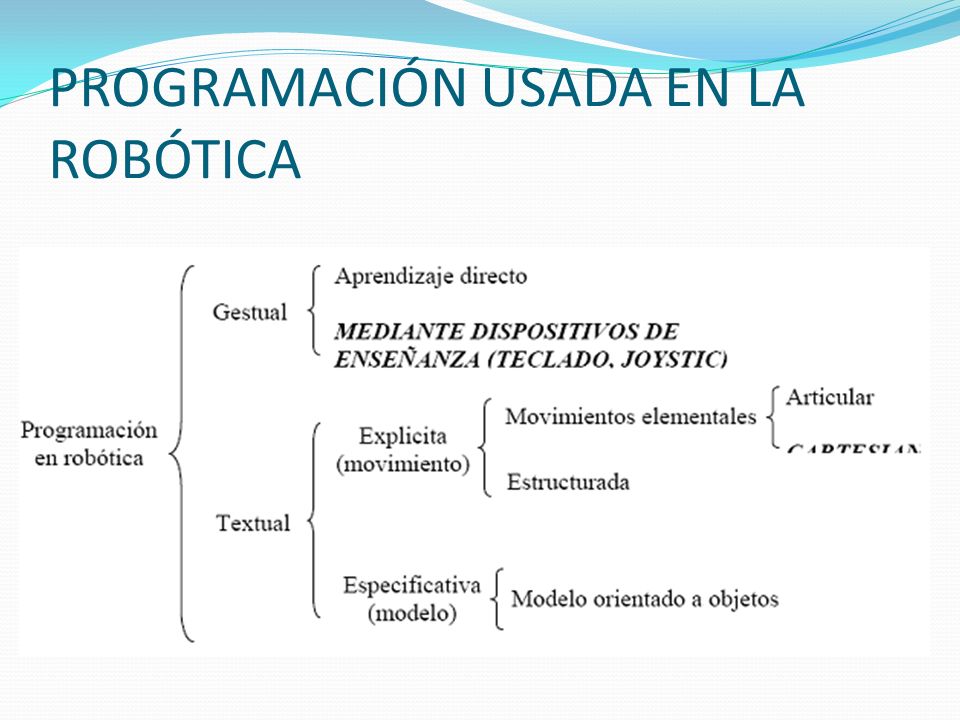
Los lenguajes de programación textual se encuadran en varios niveles, según se realice la descripción del trabajo del robot. Se relacionan a continuación, en orden creciente de complejidad:
1. Lenguajes elementales, que controlan directamente el movimiento de las articulaciones del manipulador
2. Lenguajes dirigidos a posicionar el elemento terminal del manipulador.
3. Lenguajes orientados hacia el objeto sobre el que opera el sistema.
4. Lenguajes enfocados a la tarea que realiza el robot.
En una aplicación tal como el ensamblaje de piezas, en la que se requiere una gran precisión, los posicionamientos seleccionados mediante la programación gestual no son suficientes, debiendo ser sustituidos por cálculos más perfectos y por una comunicación con el entorno que rodea al sistema.
En la programación textual, la posibilidad de edición es total. El robot debe intervenir, sólo, en la puesta a punto final.
Según las características del lenguaje, pueden confeccionarse programas de trabajo complejos, con inclusión de saltos condicionales, empleo de bases de datos, posibilidad de creación de módulos operativos intercambiables, capacidad de adaptación a las condiciones del mundo exterior, etc.

Dentro de la programación textual, existen dos grandes grupos de características netamente diferentes:
Programación textual explícita

En la programación textual explícita, el programa consta de una secuencia de órdenes o instrucciones concretas, que van definiendo con rigor las operaciones necesarias para llevar a cabo la aplicación. Se puede decir que la programación explícita engloba a los lenguajes que definen los movimientos punto por punto, similares a los de la programación gestual, pero bajo la forma de un lenguaje formal. Con este tipo de programación, la labor del tratamiento de las situaciones anormales, colisiones, etc., queda a cargo del programador.
Dentro de la programación explícita, hay dos niveles:
Primer nivel
Los lenguajes del tipo cartesiano utilizan transformaciones homogéneas. Este hecho confiere "popularidad" al programa, independizando a la programación del modelo particular del robot, puesto que un programa confeccionado para uno, en coordenadas cartesianas, puede utilizarse en otro, con diferentes coordenadas, mediante el sistema de transformación correspondiente. Son lenguajes que se parecen al básico, sin poseer una unidad formal y careciendo de estructuras a nivel de datos y de control.Por el contrario, los lenguajes del tipo articular indican los incrementos angulares de las articulaciones. Aunque esta acción es bastante simple para motores de paso a paso y corriente continua, al no tener una referencia general de la posición de las articulaciones con relación al entorno, es difícil relacionar al sistema con piezas móviles, obstáculos, cámaras de TV, etc.
Los lenguajes correspondientes al nivel de movimientos elementales aventaja, principalmente, a los de punto a punto, en la posibilidad de realizar bifurcaciones simples y saltos a subrutinas, así como de tratar informaciones sensoriales.
Segundo nivel
Intenta introducir relaciones entre el objeto y el sistema del robot, para que los lenguajes se desarrollen sobre una estructura formal.
Se puede decir que los lenguajes correspondientes a este tipo de programación adoptan la filosofía del PASCAL. Describen objetos y transformaciones con objetos, disponiendo, muchos de ellos, de una estructura de datos arborescente.
El uso de lenguajes con programación explícita estructurada aumenta la comprensión del programa, reduce el tiempo de edición y simplifica las acciones encaminadas a la consecución de tareas determinadas.
En los lenguajes estructurados, es típico el empleo de las transformaciones de coordenadas, que exigen un cierto nivel de conocimientos. Por este motivo dichos lenguajes no son populares hoy en día.
Programación textual especificativa.
 El sistema informático para la programación textual especificativa ha de disponer del modelo del universo, o mundo donde se encuentra el robot. Este modelo será, normalmente, una base de datos más o menos compleja, según la clase de aplicación, pero que requiere siempre, computadoras potentes para el procesado de una abundante información.
El sistema informático para la programación textual especificativa ha de disponer del modelo del universo, o mundo donde se encuentra el robot. Este modelo será, normalmente, una base de datos más o menos compleja, según la clase de aplicación, pero que requiere siempre, computadoras potentes para el procesado de una abundante información.
Se trata de una programación del tipo no procesal, en la que el usuario describe las especificaciones de los productos mediante una modelización, al igual que las tareas que hay que realizar sobre ellos.
 El sistema informático para la programación textual especificativa ha de disponer del modelo del universo, o mundo donde se encuentra el robot. Este modelo será, normalmente, una base de datos más o menos compleja, según la clase de aplicación, pero que requiere siempre, computadoras potentes para el procesado de una abundante información.
El sistema informático para la programación textual especificativa ha de disponer del modelo del universo, o mundo donde se encuentra el robot. Este modelo será, normalmente, una base de datos más o menos compleja, según la clase de aplicación, pero que requiere siempre, computadoras potentes para el procesado de una abundante información.
El trabajo de la programación consistirá, simplemente, en la descripción de las tareas a realizar, lo que supone poder llevar a cabo trabajos complicados.
Actualmente, los modelos del universo son del tipo geométrico, no físico.
Dentro de la programación textual especificativa, hay dos clases, según que la orientación del modelo se refiera a los objetos a los objetivos.
Si el modelo se orienta al nivel de los objetos, el lenguaje trabaja con ellos y establece las relaciones entre ellos. La programación se realiza "off-line" y la conexión CAM es posible.
Dada la inevitable imprecisión de los cálculos del ordenador y de las medidas de las piezas, se precisa de una ejecución previa, para ajustar el programa al entorno del robot.
Los lenguajes con un modelo del universo orientado a los objetos son de alto nivel, permitiendo expresar las sentencias en un lenguaje similar al usado comúnmente.
Por otra parte, cuando el modelo se orienta hacia los objetivos, se define el producto final.
La creación de lenguajes de muy alto nivel transferirá una gran parte del trabajo de programación, desde el usuario hasta el sistema informático; éste resolverá la mayoría de los problemas, combinando la Automática y la Inteligencia Artificial.
Imagenes:shorturl.at/IKNSV
shorturl.at/kDI69
shorturl.at/biWX9







{kind=link}